 وب سایت فنی مهندسی الکترونیک
وب سایت فنی مهندسی الکترونیک
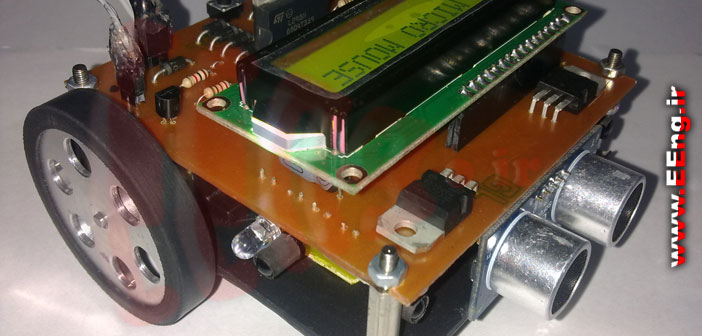
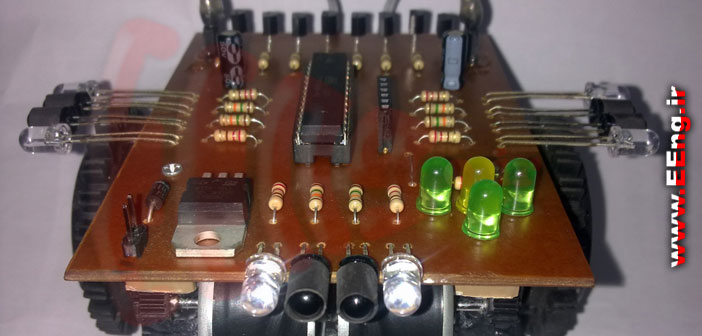
این پروژه یک ربات میکرو موس یا ربات حل ماز است که در آن از ماژول آلتراسونیک SRF05 جهت تشخیص فاصله ربات با دیواره جلو استفاده شده است. حداقل فاصله قابل سنجش 2 سانتی متر بوده و حداکثر فاصله 4 متر می باشد. جهت تشخیص دیواره های چپ و …
بیشتر بخوانید »ربات میکروموس مجهز به تشخیص فاصله