 وب سایت فنی مهندسی الکترونیک
وب سایت فنی مهندسی الکترونیک
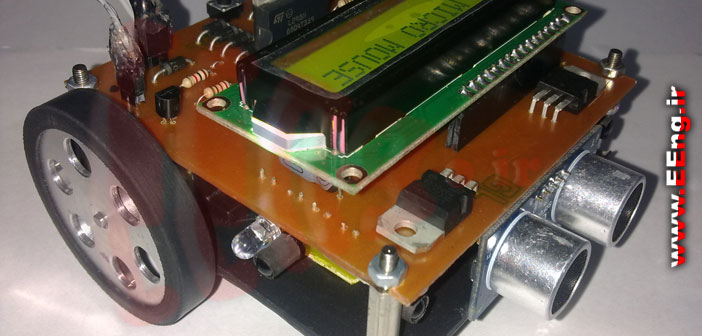
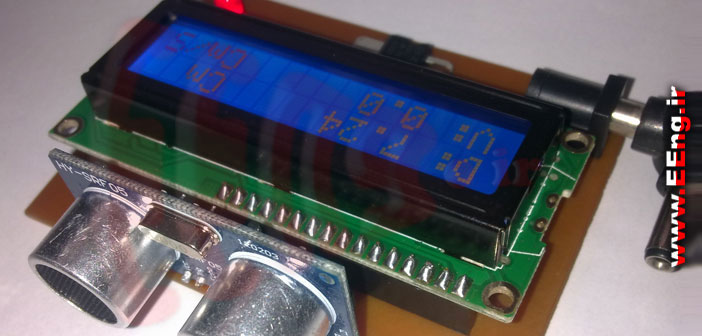
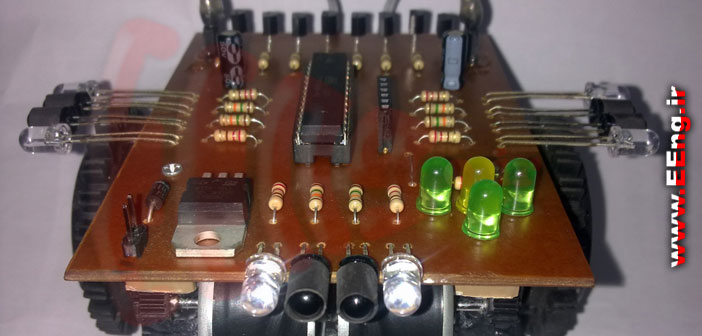
این پروژه یک ربات میکرو موس یا ربات حل ماز است که در آن از ماژول آلتراسونیک SRF05 جهت تشخیص فاصله ربات با دیواره جلو استفاده شده است. حداقل فاصله قابل سنجش 2 سانتی متر بوده و حداکثر فاصله 4 متر می باشد. جهت تشخیص دیواره های چپ و راست و جلو از سنسور مادون قرمز استفاده شده است. این ربات دارای الگوریتمی در سطح متوسط می باشد و برنامه آن طوری نوشته شده است که در صورت تنظیم صحیح سنسورها از برخورد ربات با دریواره ها جلوگیری می کند. موتورهای استفاده شده در این ربات از نوع موتور مینی گیربکس دار می باشند و همچنین برای نمایش اطلاعات فاصله و تشخیص دیواره ها از LCD کارکتری 16*2 استفاده شده است. میکروکنترلر استفاده شده ATmega16 می باشد و برنامه به زبان بیسیک نوشته شده است.

نحوه کار ربات بدین صورت است که بعد از عبور شیعی از مقابل سنسور التراسونیک ربات شروع به فعالیت می کند و در هر بار که ربات به سمت چپ یا راست گردش می کند فاصله مانع مقابل را محاسبه کرده و نمایش می دهد. لازم به ذکر است که این ربات قابلیت چرخش 180 درجه به صورت درجا دارد.
سفارش پروژه سفارش پروژه با تغییرات برنامه دمو: برنامه ای است که در آن بخشی از برنامه کامل حذف شده تا از کپی برداری دستگاه جلوگیری شود، البته این برنامه برای ارائه دانشجویی مناسب است. شما می توانید برنامه کامل را به صورت مجزا، خریداری نمایید. |